



Robot skręcający REECO – automatyzacja wkręcania dla nowoczesnej produkcji
Stabilna jakość montażu i maksymalna powtarzalność procesu
Robot skręcający REECO to zaawansowany system automatyzacji procesów wkręcania i montażu mechanicznego, zaprojektowany z myślą o produkcji wymagającej precyzji, szybkości i niezawodności. Umożliwia powtarzalne dokręcanie śrub, wkrętów i innych elementów złącznych z kontrolą momentu obrotowego, kąta oraz głębokości – eliminując błędy ludzkie i zmienność manualnych operacji.
Robot znajduje zastosowanie w liniach produkcyjnych, gdzie wysoka jakość montażu ma bezpośredni wpływ na trwałość i bezpieczeństwo gotowego wyrobu, np. w branży elektronicznej, motoryzacyjnej, AGD czy precyzyjnym montażu modułów.
Inteligentne wkręcanie z kontrolą parametrów
Wyposażony w precyzyjne elektryczne lub pneumatyczne wkrętaki, robot skręcający REECO umożliwia pełną kontrolę nad parametrami dokręcania – momentem, prędkością oraz kątem obrotu. System monitoruje każdy cykl skręcania w czasie rzeczywistym, a wbudowane czujniki umożliwiają natychmiastowe wykrycie błędów takich jak przekręcenie, niedokręcenie czy brak elementu. Zaawansowane oprogramowanie pozwala na zapis wielu receptur montażowych i szybkie przełączanie się między różnymi produktami, co czyni robota idealnym narzędziem dla linii o zmiennej produkcji i krótkich seriach.
Zastosowania w automatyzacji montażu
Robot skręcający REECO znajduje zastosowanie wszędzie tam, gdzie wymagane jest szybkie, precyzyjne i kontrolowane łączenie elementów: od elektroniki użytkowej, przez moduły samochodowe i urządzenia medyczne, po systemy oświetleniowe i obudowy przemysłowe. System może obsługiwać różne typy złącz, gniazd i śrub, niezależnie od ich wymiarów czy kształtów.
Integracja z liniami produkcyjnymi i stanowiskami roboczymi
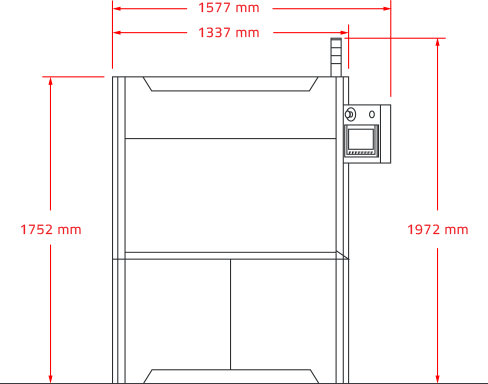
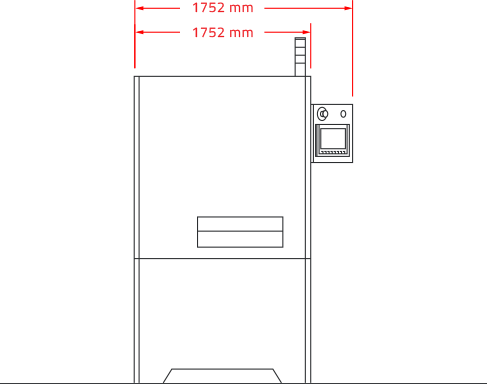
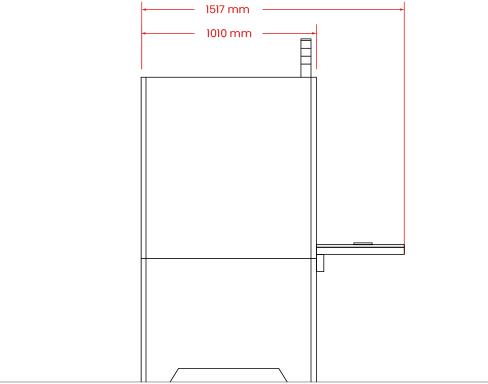
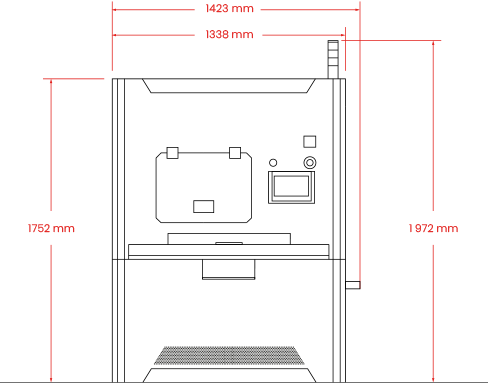
Modularna budowa robota oraz jego kompaktowe rozmiary pozwalają na łatwą integrację z istniejącymi liniami produkcyjnymi oraz komórkami montażowymi. Interfejs HMI umożliwia operatorowi konfigurację parametrów, kontrolę cyklu i dostęp do logów z każdego etapu pracy. System może współpracować z podajnikami śrub, kamerami wizyjnymi i czujnikami pozycji.
Automatyzacja, która skręca precyzyjnie i bez kompromisów
Robot skręcający REECO podnosi jakość montażu, zwiększa wydajność i pozwala zachować pełną powtarzalność procesu w środowisku przemysłowym. To narzędzie gotowe na wymagania Przemysłu 4.0 – z pełną kontrolą procesu, identyfikowalnością danych i gotowością do pracy 24/7.
Zastosowania robota skręcającego REECO
- Wkręcania śrub i elementów złącznych w obudowach elektronicznych
- Precyzyjnego montażu modułów w branży automotive
- Montażu komponentów AGD i urządzeń przemysłowych
- Obsługi różnych typów śrub i gniazd (krzyżakowych, torx, sześciokątnych)
- Zastosowań w produkcji urządzeń medycznych, oświetlenia i automatyki